גל ארכובה מנוע V8 מתחלק באופן גס לשני סוגים, האחד הוא גל ארכובה צולב והשני הוא גל ארכובה שטוח. ההבדל הגדול ביותר הוא שהזווית בין כל שני גלי ארכובה היא 90 מעלות במקום 180 מעלות. מנוע גל ארכובה מטוס V8 בעל מבנה פשוט ואינרציה קטנה, המסייעת לסיבובים גבוהים ותגובת מנוע, עם סופר רטט...
ישנם שני מושגים של רטט מכני של מנוע: רטט מסדר ראשון ורטט מסדר שני
רטט מסדר ראשון מתייחס לרטט באותה תדירות כמו מהירות הסיבוב של גל הארכובה. ניתן להבין את שיטת ההימנעות מרטט זה כ"אם בוכנה עולה, יש בוכנה למטה".
לְמָשָׁל. מכונת שלושה צילינדרים
בכל רגע שבו גל הארכובה מסתובב, לא רק שמספר הבוכנות למעלה ולמטה תמיד משתנה, כיווני התנועה של הבוכנות של צילינדר 1 ושל צילינדר 3 הם תמיד הפוכים, מה שגורם למנוע לא רק לרטוט למעלה ולמטה, זה גם מתנודד קדימה ואחורה. אם אתה רוצה להשתמש בו על מכונית בייצור המוני, עליך לצייד אותו בפיר איזון, אחרת אתה יכול להשתמש בו כדי להניע צעצוע חשמלי. כמו שנאמר: שלושת הצילינדרים זעזע את העולם.
אבל המכונה הנפוצה עם ארבעה צילינדרים
נראה ששני צילינדרים נעים למעלה ואילו שני צילינדרים נעים למטה. האם זה מנוע מושלם?
רטט מסדר שני, כלומר רטט בתדירות השווה למהירות כפולה ממהירות הסיבוב של גל הארכובה
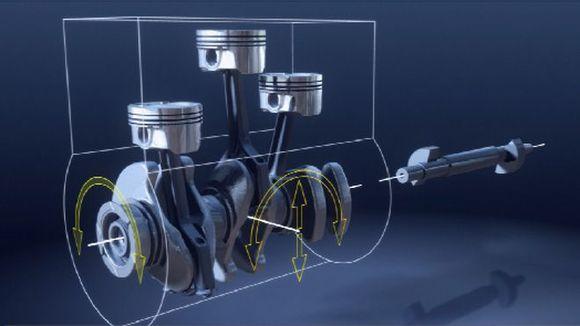
הוצאת חצי ממנוע ארבעת הצילינדרים לניתוח בנפרד, לא קשה לגלות שבגלל התצורה הגיאומטרית של מוט החיבור הארכובה, מהירות הבוכנה כלפי מעלה תמיד מהירה יותר ממהירות הבוכנה כלפי מטה, מה שגורם ל- מנוע לרטוט מעלה ומטה כל 180 מעלות של גל הארכובה. .
פִּתָרוֹן? גל איזון שמסתובב פי שניים מהר יותר מגל הארכובה. ניתן לומר שאחרי שמיצובישי יישמה לראשונה את גל האיזון הכפול על מנוע ה-4 סגמנטים בייצור המוני בשנות ה-70, באמת היה עתיד לסוג המנוע הזה.
עם זאת, לגל הארכובה המוקדם של מנוע ארבעה צילינדרים לא היה אפילו משקל נגד. בנוסף לבעיות בתהליך העיבוד באותה תקופה, מהירות המנוע הייתה נמוכה מזו של מנוע הדיזל הנוכחי.
אז בשנות ה-10, מעצבי קאדילק ופורד רצו לפתור את בעיית הרטט באמצעות זווית של 90 מעלות ומשקל נגד. (אבל בתיאוריה, ציר המטוס אינו זקוק לעיצוב זה)
שסתום הצד V8 וגל הארכובה השטוח והפשוט באותה תקופה
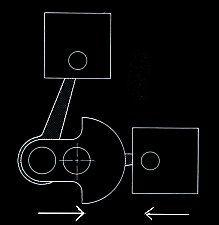
היתרון של מנוע הזווית הכלול ב-90° הוא שניתן להשתמש במשקל האיזון על גל הארכובה כדי לקזז את מומנט הרטט שנוצר מתנועת הבוכנה בשורה נוספת של צילינדרים. עיקרון זה חל על מנוע מסוג V 90 מעלות עם מספר זוגות של צילינדרים.
לדוגמה, כאשר הגליל העליון זז כלפי מעלה, משקל הנגד נע כלפי מטה. תוך כדי סיבוב נגד כיוון השעון, מהירות המשקל הנגדית מצביעה לימין התחתון לאחר הסיבוב בשעה 6, אך הבוכנה הנעה מימין לשמאל סותרת את הרגע הזה.
אבל בשנות ה-20, מהירות המנוע עלתה, ובעיית הרטט המשני נעשתה ברורה יותר ויותר, כך שרוב מנועי ה-V8 בייצור המוני החלו להיות מצוידים בגל ארכובה צולב.
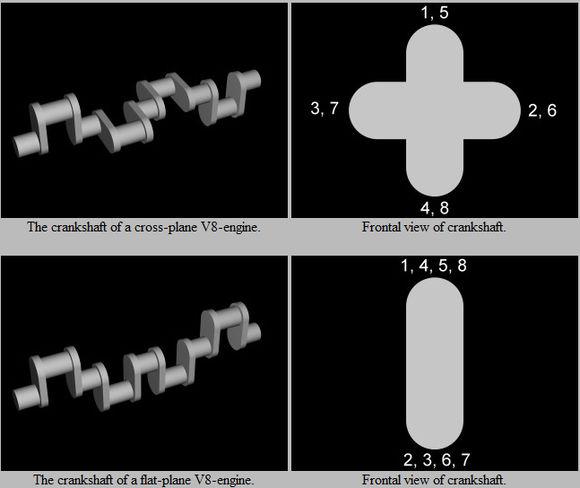
ההבדל הגדול ביותר בין גל ארכובה צולב (עליון) לגל הארכובה המישורי (תחתון) הוא שהזווית בין כל שני גל ארכובה היא 90 מעלות במקום 180 מעלות. לגל הארכובה המטוס V8 תהיה אותה בעיית רטט משנית כמו למנוע 4 הישר, והמרווח של 90 מעלות בין שתי שורות הצילינדרים יגרום גם לרעידות של 180 מעלות להיות מעל. גל ארכובה צולב נובע מכך שההבדל בין שתי קבוצות של גל ארכובה המופרדים ב-180 מעלות הוא 90 מעלות במקום 180 מעלות. תדירות הרטט המשנית היא רק מחצית מגל הארכובה המטוס, והמשרעת מופחתת מאוד.
זוכרים את היתרונות של מנוע ה-90 מעלות? הבעיה נפתרת לאחר הוספת משקל הנגד
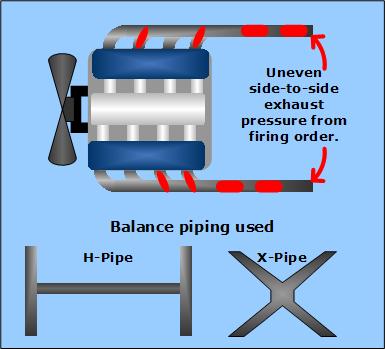
אבל כאן באה הבעיה. מכיוון שלכל שורה של צילינדרים יש שתי בוכנות המגיעות למרכז המת העליון במרווחים של 90 מעלות, לא משנה איך מסודר רצף ההצתות, לכל שורת צילינדרים יהיו שתי הצתה במרווחים של 90 מעלות, וכתוצאה מכך הפרעות פליטה חמורות (כלומר, מנועי V8 הכלליים דומים לגורם לרעש פליטה ממכונות חקלאיות).
לכן, על מנת להגדיל את יכולת ההשקה במהירויות נמוכות, ה-V8 האזרחי הכללי יתכנן צינור איזון מסוג H או מסוג X באמצע הפליטה, וישתמש בהפרש הלחצים בין שני האגזוזים כדי להפחית את ההשפעה של הפרעות פליטה.
חלק מ-V8 ממוקדי ביצועים משתמשים בעיצוב סבוך יותר. לדוגמה, צינור הפליטה של פורד GT מחבר את צילינדר ההצתה הסמוך לסעפת הפליטה בצד השני. מה גם (הב.מ.וו התזזית) לא מהסס למצות את האגזוז. נמדד בחלק הפנימי של ה-V כדי להשתמש בסעפות פליטה מסובכות יותר
אז גל ארכובה צולב אינו דבר טוב עבור מנועים בעלי ביצועים גבוהים. למרות שהרעידה קטנה, משקל הנגד הכבד גורם לאינרציה הפנימית של המנוע גדולה מדי, מה שלא תורם לתגובת המנוע הרגישה ולמימוש המהירות הגבוהה, שלא לדבר על הפחתת המשקל. בנוסף, הפרעות אגזוז הן גם טאבו מרכזי של מנועי ביצועים. אז מנוע ה-V8 האירופאי בעל הביצועים הגבוהים עדיין מתעקש להשתמש בגל ארכובה שטוח.
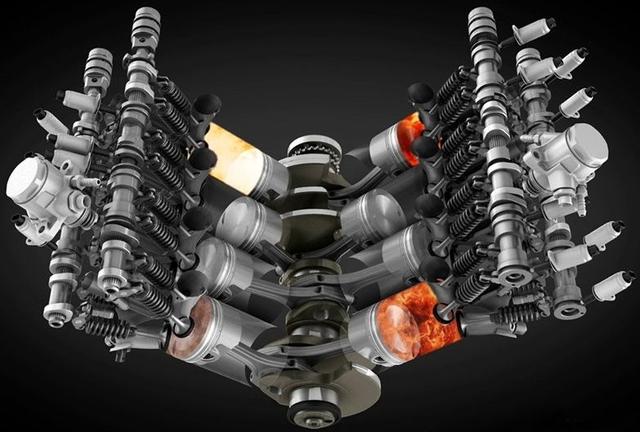
גל ארכובה המטוס V8 בעצם מרתך שני 4 ישרים יחד. מכיוון שהבוכנות הרצות כלפי מעלה ומטה הן תמיד בזוגות, לא תהיה בעיית רטט ראשונית, אבל הרטט המשני הכפול חייב לדרוש ציר איזון כבד יותר. להתמודד עם. התוספת של גל האיזון מגדילה את המסה ואת מומנט האינרציה, ולכן מנועי ביצועים אלה משתמשים בבוכנות קצרות מהלך ובמבנים חזקים יותר כדי לטפל בסימפטומים ולא בשורש הגורם למזער את הרעידות הללו.
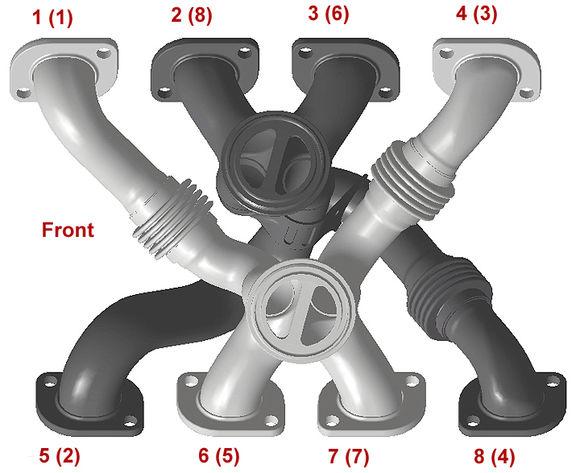
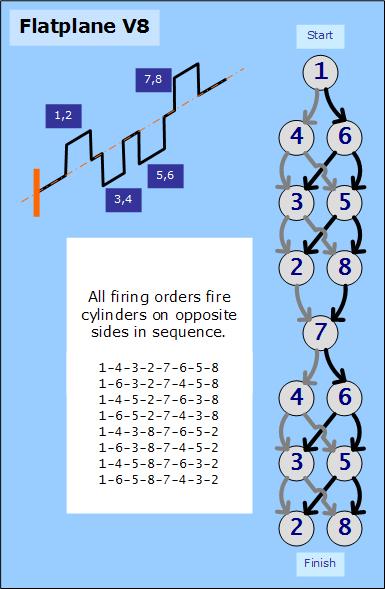
רצף הירי של גל ארכובה V8 המטוס הוא פשוט מאוד, ואין בעיה שהגל הצולב V8 וצילינדר הפליטה נדלקים ברצף. הצילינדרים שעובדים הם תמיד שמאל-ימין-שמאל-ימין-שמאל-ימין-שמאל-ימין... במקום שמאל-ימין-שמאל-שמאל-ימין-שמאל-ימין-ימין כמו הציר הצלב, אז יש אין שורה לבעיות של הפרעות אוויר, אתה יכול להשתמש בסעפות פליטה קונבנציונליות באורך שווה כדי להגביר את ההספק בסיבובים גבוהים.
סכמו את היתרונות והחסרונות של הציר הצולב והציר המישורי
פיר צולב
יתרונות: רטט נמוך ותפעול חלק
חסרונות: משקל כבד, אינרציה גדולה, הפרעות פליטה
ציר מישור
יתרונות: מבנה פשוט, אינרציה נמוכה, טוב למהירות גבוהה ותגובת המנוע
חסרונות: רטט גדול

.jpg)
.jpg)
.jpg)
.jpg)


.jpg)
.jpg)